2.4.2.J
FEM-Lösung
siehe B2.A
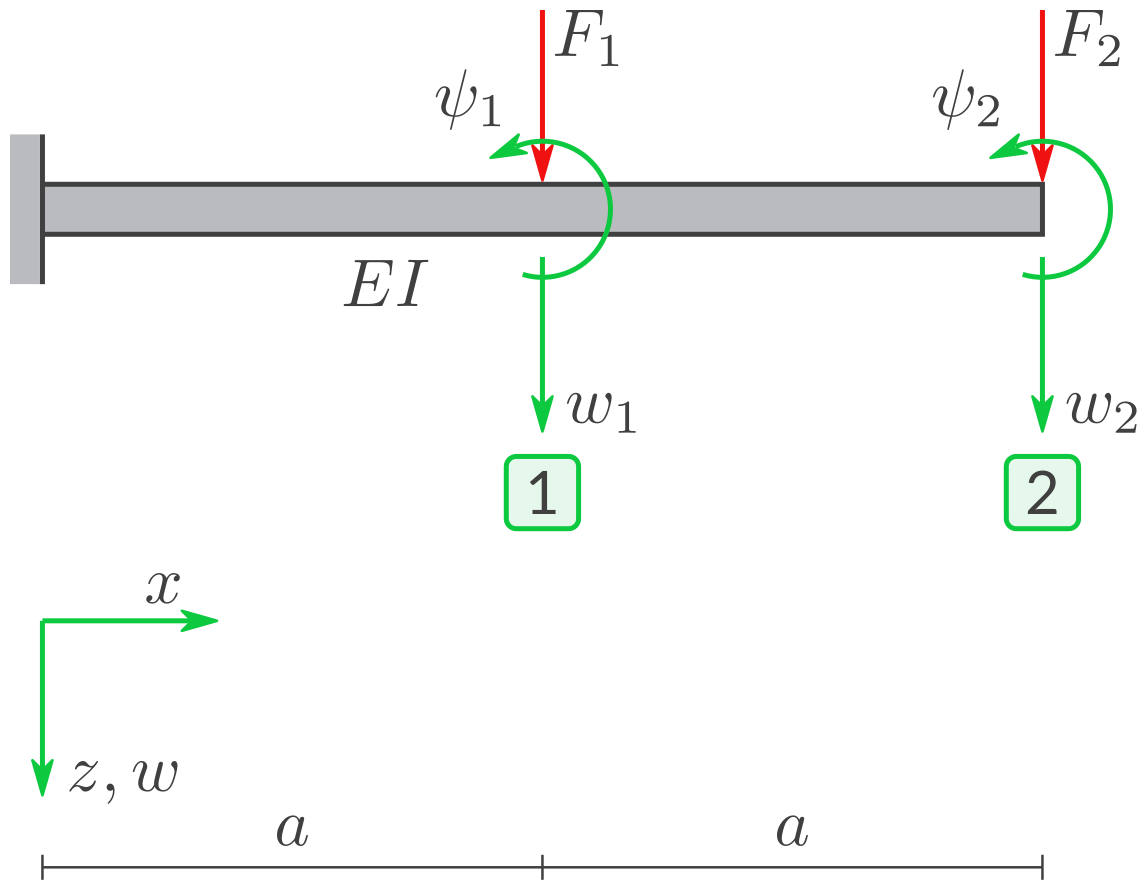
Gegebene Symbole: \(a, EI, F_1, F_2.\)
Ein Kragbalken ist belastet durch zwei Kräfte \(F_1\) und \(F_2\) und erleidet Verformungen \(w_1, \psi_1, w_2, \psi_2.\)
Berechnen Sie die Querverschiebungen \(w_1\) und \(w_2\) sowie die Neigungswinkel \(\psi_1\) und \(\psi_2\). Beachten Sie, dass die Deformation aufgrund \(F_1\) und \(F_2\) die Superposition ist aus der Deformation aufgrund \(F_1\) und der aufgrund \(F_2.\)
Formeln aus Literatur
Gegeben sind außerdem folgende Informationen für einen allgemeinen Kragbalken unter einer variabel positionierten Last \(\boldsymbol F\).
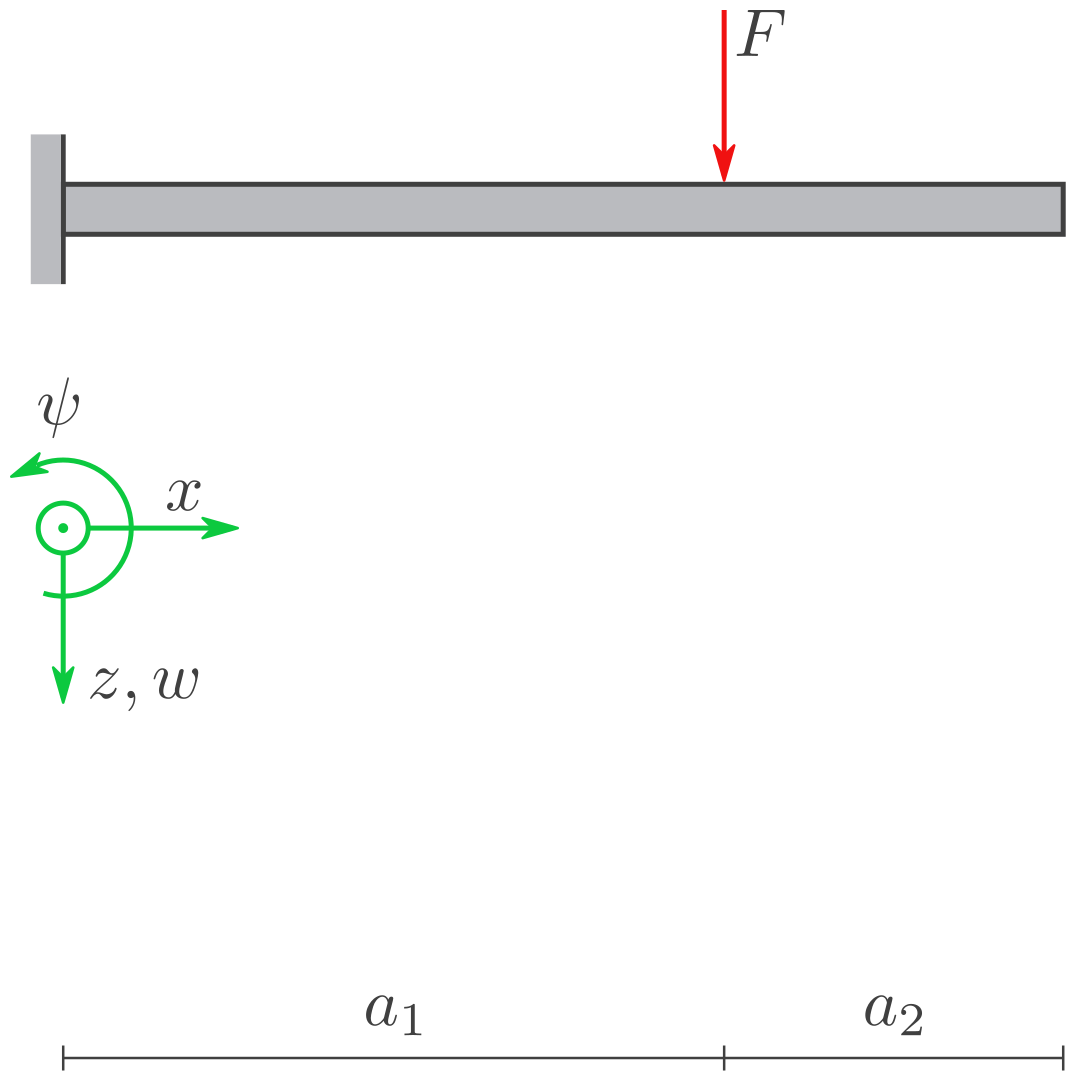
Sei wie im Bild dargestellt:
\(a_1\): Der Abstand zwischen der Einspannung und \(\boldsymbol F\).
\(a_2\): Der Abstand zwischen \(\boldsymbol F\) und dem Ende des Balkens.
Hiermit gilt Folgendes: Wirkt an der Position \(a_1\) eine Kraft \(F\) und setzt sich der Balken dahinter fort um \(a_2\). Dann gilt für die Verschiebung \(w\) und den Neigungswinkel \(\psi\) an einer Position \(\xi\):
mit \(\left(r, \xi\right)\) und der Föppl-Klammer für \(n\ge 0\) gemäß:
(1) abgeleitet nach \(\xi\): Weiterhin ist \(\tfrac{\partial \xi}{\partial x} = \tfrac{1}{a_1+a_2}\), so dass:Herleitung von (2) aus (1)
Untersuchen Sie die Struktur. Gehen Sie wie folgt vor.
a) Berechnen der Deformationen
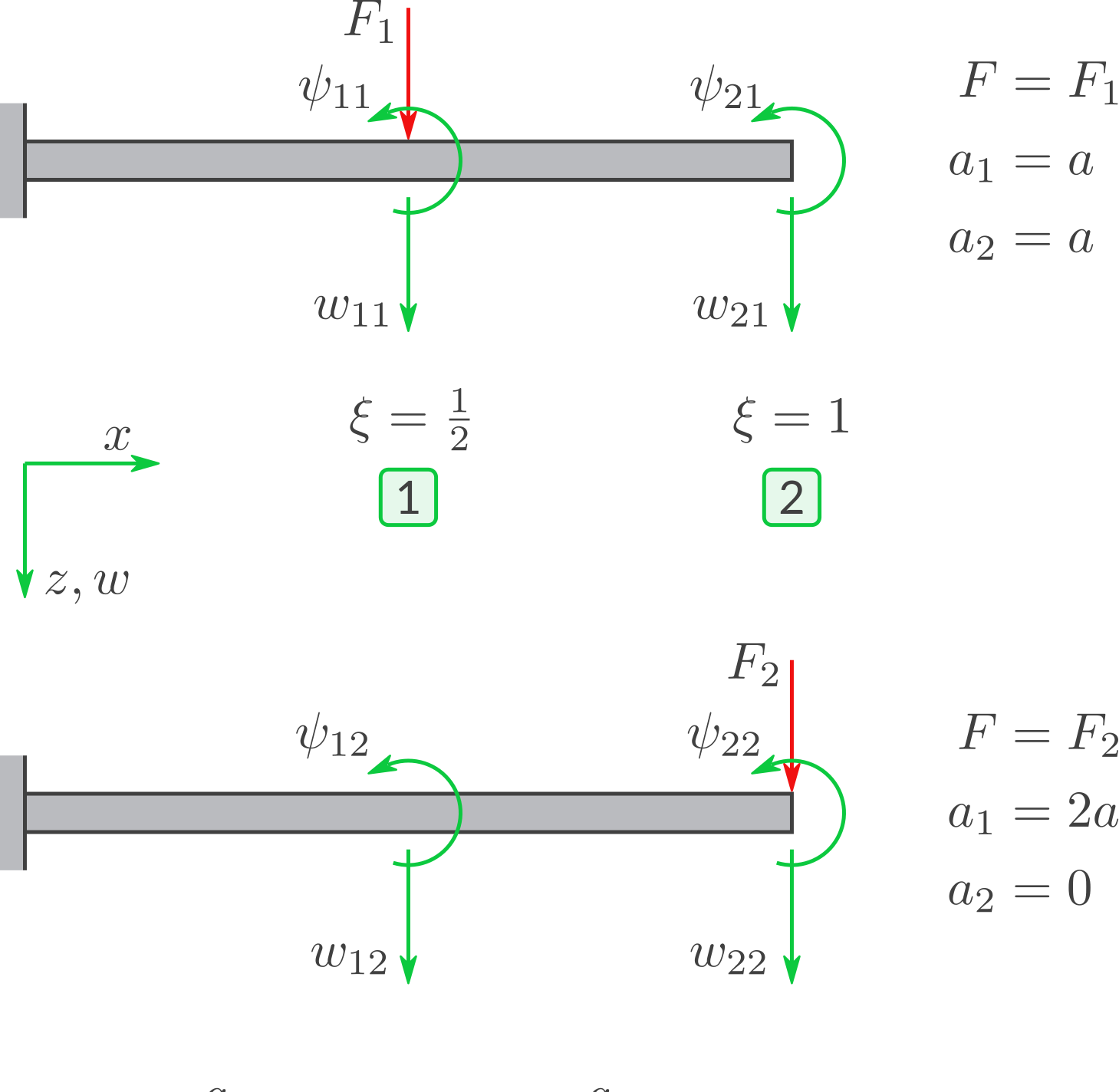
Werten Sie (1) und (2) aus. Zeigen Sie, dass:
Hierbei ist:
\(w_{11}\): Verschiebung bei Position 1, also in Balkenmitte bei \(\xi = \tfrac 1 2,\) aufgrund \(F_1\).
\(\psi_{11}\): Neigung bei Position 1 aufgrund \(F_1\).
\(w_{21}\): Verschiebung bei Position 2, also rechts bei \(\xi = 1,\) aufgrund \(F_1\).
b) Superposition
Berechnen Sie die Querverschiebung \(w_1\) und den Neigungswinkel \(\psi_1\) bei \(F_1\) aufgrund beider Kräfte \(F_1\) und \(F_2.\) Zeigen Sie, dass:
Einsetzen der Werte aus (2) liefert das Ergebnis.Lösung
c) Ergebnis für Größen
Berechnen Sie \(w_2\) in \(\mathrm{mm}\) (Millimeter) für die folgenden Größen:
Runden Sie auf Rundestellenwert \(0{,}01\). Zeigen Sie, dass:
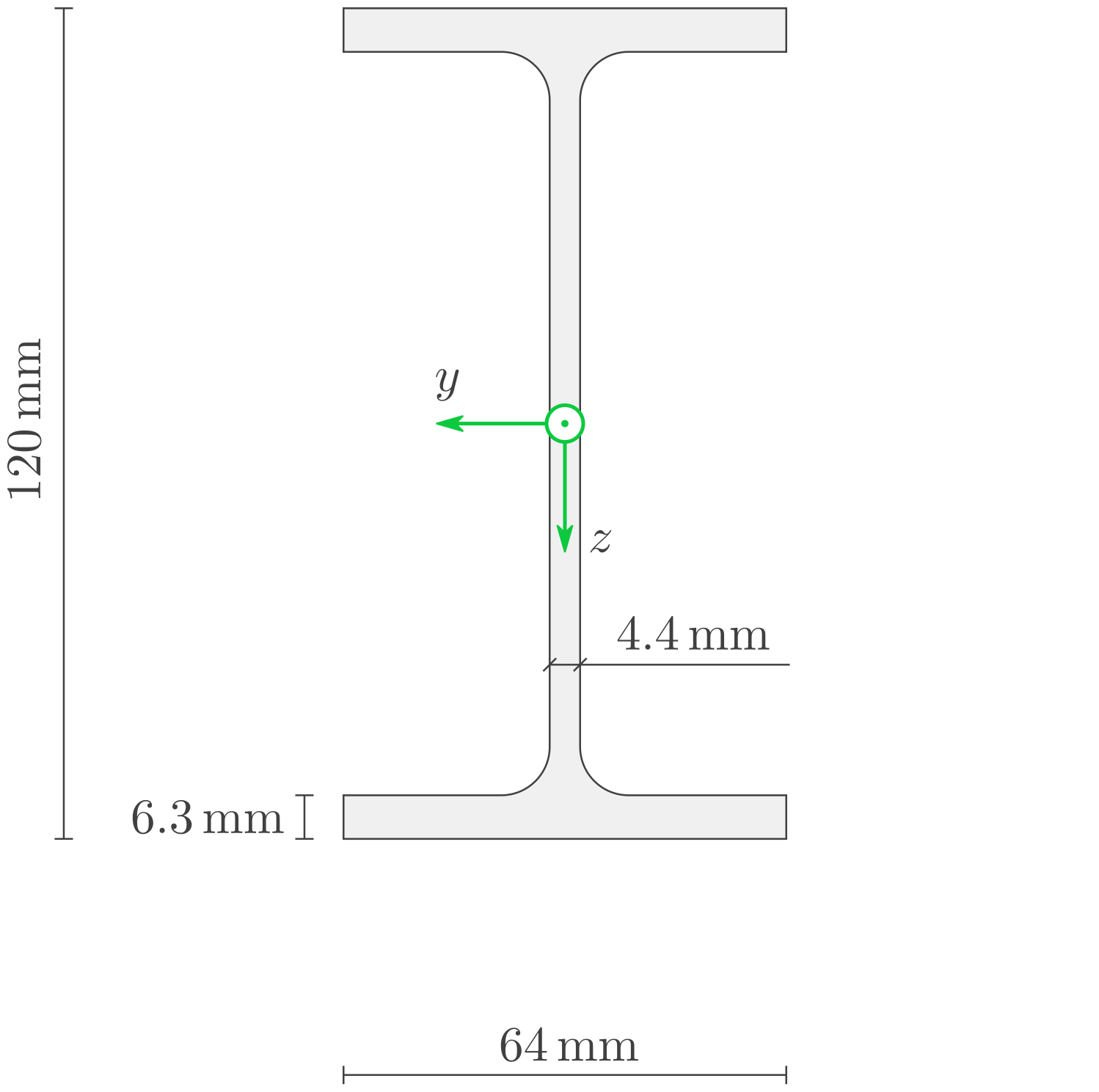
Einsetzen der gegebenen Größen liefert: \(E= 210 \,\mathrm{GPa}\) entspricht dem E-Modul von Stahl. \(I = 318 \,\mathrm{cm}^4\) entspricht dem \(I_{yy}\) eines IPE 120. DIN 1025-5: IPE 120: \(I_{yy}\stackrel{1.0}{\approx} 318 \,\mathrm{cm}^4\) \(F_1 = F_2 = 10 \,\mathrm{kN}\) entspricht ca. der Gewichtskraft eines VW Polo. VW Polo: Masse ca. \(1000\,\mathrm{kg}\), Gewichtskraft ca. \(1000\,\mathrm{kg} \cdot 10\,\tfrac{\mathrm{m}}{\mathrm{s}^2} = 10 \,\mathrm{kN}\)Lösung
Veranschaulichung

d) Funktionsgraph
Zeichnen Sie für diese Größen \(w\) in \(\mathrm{mm}\) (Millimeter) über \(\tfrac{x}{2a}\).
Zeigen Sie, dass die Gesamtverschiebung gleich ist der Summe von:
der Verschiebung aufgrund \(F_1\) und
der Verschiebung aufgrund \(F_2\).
Lösung
Nachfolgend ein Programm, dass Sie ausführen können: Auf dem PC z.B. mit Anaconda. Im Browser (online) in drei Schritten: Copy: Source Code in die Zwischenablage kopieren. Paste: Source Code als Python-Notebook einfügen z.B. auf: JupyterLite oder JupyterLab oder Play: Ausführen. Statt SymPy lieber anderes CAS (Computeralgebrasystem) verwenden? Eine Auswahl verschiedener CAS gibt es hier.SymPy
from sympy.physics.units import *
from sympy import *
# Units:
(mm, cm) = ( m/1000, m/100 )
kN = 10**3*newton
Pa = newton/m**2
MPa = 10**6*Pa
GPa = 10**9*Pa
deg = pi/180
half = S(1)/2
# Rounding:
import decimal
from decimal import Decimal as DX
from copy import deepcopy
def iso_round(obj, pv,
rounding=decimal.ROUND_HALF_EVEN):
import sympy
"""
Rounding acc. to DIN EN ISO 80000-1:2013-08
place value = Rundestellenwert
"""
assert pv in set([
# place value # round to:
"1", # round to integer
"0.1", # 1st digit after decimal
"0.01", # 2nd
"0.001", # 3rd
"0.0001", # 4th
"0.00001", # 5th
"0.000001", # 6th
"0.0000001", # 7th
"0.00000001", # 8th
"0.000000001", # 9th
"0.0000000001", # 10th
])
objc = deepcopy(obj)
try:
tmp = DX(str(float(objc)))
objc = tmp.quantize(DX(pv), rounding=rounding)
except:
for i in range(len(objc)):
tmp = DX(str(float(objc[i])))
objc[i] = tmp.quantize(DX(pv), rounding=rounding)
return objc
# ---
F1, F2, a, EI = var("F1, F2, a, EI")
def macaulay(x, a, n):
"https://en.wikipedia.org/wiki/Macaulay_brackets"
if x < a:
return 0
else:
return (x-a)**n
def w(EI, F, a1, a2, r, xi):
xi2 = xi*xi
xi3 = xi*xi*xi
tmp = F/6/EI
tmp *= (a1 + a2)**3
tmp *= 3*xi2*r - xi3 + macaulay(xi,r,3)
return tmp
def psi(EI, F, a1, a2, r, xi):
xi2 = xi*xi
tmp = - F/6/EI
tmp *= (a1 + a2)**2
tmp *= 6*xi*r - 3*xi2 + 3*macaulay(xi,r,2)
return tmp
# Given symbols:
a, EI, F1, F2 = var("a, EI, F1, F2")
tpl_D = {}
tpl_D["11"] = ( F1, a, a, half, half )
tpl_D["21"] = ( F1, a, a, half, 1 )
tpl_D["12"] = ( F2, 2*a, 0, half, half )
tpl_D["22"] = ( F2, 2*a, 0, 1, 1 )
w_D = {}
p_D = {}
for x in sorted(tpl_D):
(F, a1, a2, r, xi) = tpl_D[x]
w_D[x] = w(EI, F, a1, a2, r, xi)
p_D[x] = psi(EI, F, a1, a2, r, xi)
(w1, p1) = (w_D["11"] + w_D["12"], p_D["11"] + p_D["12"])
(w2, p2) = (w_D["21"] + w_D["22"], p_D["21"] + p_D["22"])
pprint("\nw1, ψ1, w2, ψ2:")
pprint(w1)
pprint(p1)
pprint(p2)
pprint(w2)
sub_list = [
(F1, 10 *kN ),
(F2, 10 *kN ),
(a, 1 *m ),
(EI, 210 *GPa * 318*cm**4), # IPE 120
]
pprint("\nw2 / mm:")
tmp = w2.subs(sub_list)
tmp /= mm
tmp = iso_round(tmp,"0.01")
pprint(tmp)
w1, ψ1, w2, ψ2:
3 3
F₁⋅a F₂⋅a
───── + ─────
3⋅EI 3⋅EI
2 2
F₁⋅a F₂⋅a
- ───── - ─────
2⋅EI 2⋅EI
2 2
F₁⋅a 2⋅F₂⋅a
- ───── - ───────
2⋅EI EI
3 3
5⋅F₁⋅a 8⋅F₂⋅a
─────── + ───────
6⋅EI 3⋅EI
w2 / mm:
52.41