R2-Element
Video
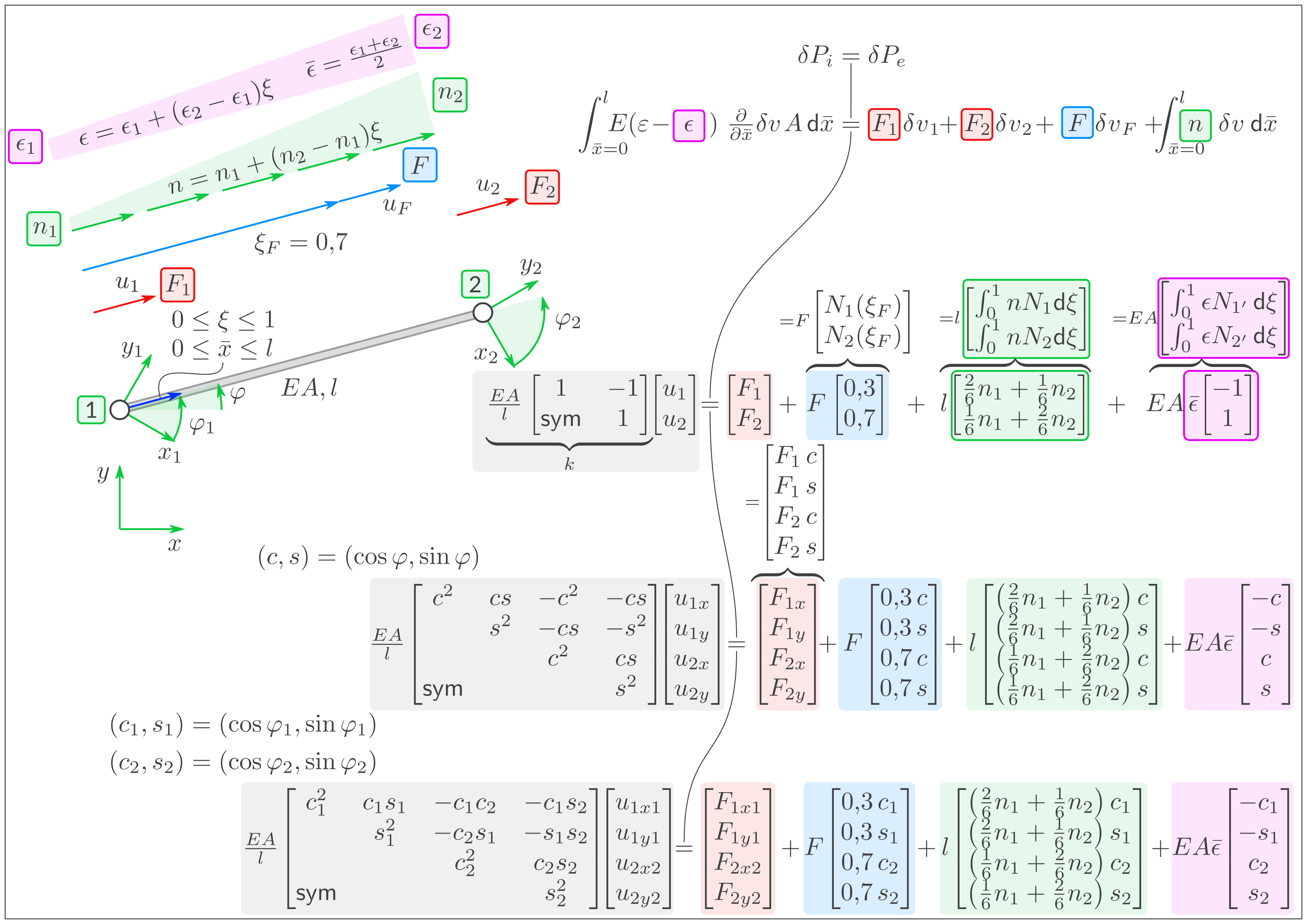
2-Knoten-Stab-Element: Prinzip der virtuellen Leistung. Äußere Lasten: Einzel-Kräfte \(F_1\) und \(F_2\) an den Knoten, Einzelkraft \(F\) zwischen den Knoten, verteilte Kraft \(n\) und Wärmeausdehnung (Verzerrung aufgrund Temperaturzuwachs) \(\epsilon\) . Lineares System in 1D und in 2D. Verwendung von \((x,y)\)-Bezugssystem bzw. von \((x_1, y_1)\)- und \((x_2, y_2)\)-Bezugssystem.
Bezeichnungen
\((x,y)\): Bezugssystem.
\((\boldsymbol u_1, \boldsymbol u_2)\): Knotenverschiebungen.
\(S\): Stabkraft: Wie üblich definiert, so dass für einen Zugstab gilt: \(S>0\).
\((\boldsymbol F_1, \boldsymbol F_2)\): Resultierende der Kräfte am Knoten (abgesehen von \(S\)).
Stab mit Winkelposition \(\varphi\):
\(\boldsymbol e\): Einheitsvektor in Stabrichtung: Vom ersten Knoten 1 zum zweiten Knoten 2.
Zählrichtung der Winkelposition \(-180^\circ < \varphi \le 180^\circ\): Positiv um die \(z\)-Achse.
Nullpunkt der Winkelposition: Es gilt \(\varphi=0\), falls \(x\) und \(\boldsymbol e\) deckungsgleich sind.
Merksatz: Man müsste die \(x\)-Achse um \(\varphi\) drehen, so dass sie deckungsgleich wäre mit \(\boldsymbol e\).
Für den Sonderfall, dass es Lokale Bezugssysteme gibt, gilt:
Es gibt zwei Winkel, nämlich \(-180^\circ < \varphi_1, \varphi_2\le 180^\circ\).
Es gibt zwei Bezugssysteme, nämlich \((x_1, y_1)\) und \((x_2, y_2)\).
Nullpunkt 1: Es gilt \(\varphi_1=0\), falls \(x_1\) und \(\boldsymbol e\) deckungsgleich sind.
Nullpunkt 2: Es gilt \(\varphi_2=0\), falls \(x_2\) und \(\boldsymbol e\) deckungsgleich sind.
Geometrie und Material:
\((l, \Delta l)\): (Stablänge undeformiert, Stabverlängerung).
\((E, A)\): (Elastiztätsmodul des Stab-Materials, Querschnittsfläche).
Interpolation
Als Ansatzfunktionen, also zur Interpolation, werden folgende Lagrange-Polynome mit der Abkürzung \(\xi = \tfrac{\bar{x}}{l}\) verwendet.
Ansatzfunktionen
Ableitungen
Verschiebung, virt. Geschwindigkeit
An der Position \(\xi = \xi_F\):
Verzerrung, Gradient der virt. Geschwindigkeit
Funktionswerte an den Knoten:Details zu den Ansatzfunktionen
Virtuelle Leistung
Virt. äußere Leistung
Virt. innere Leistung
Für konstantes \(E\) und \(A\):
Lineares System
1D
Die 3 letzten Terme, die entstehen aufgrund der Belastungen im Innern des Elements, nennt man R2_equi.
2D
Übergang zum grünen globalen \((x, y)\)-Bezugssystem liefert:
Übergang zu den grünen lokalen Bezugssystemen \((x_1, y_1)\) am Knoten 1 sowie \((x_2, y_2)\) am Knoten 2 liefert:
Der 1D-Fall wurde notiert bezüglich dem blauen \((\bar x, \bar y)\)-Bezugssystem und für den Spezialfall, dass es Kräfte und Verschiebungen nur in der \(\bar x\)-Richtung gibt. Die blaue \(\bar x\)-Richtung lässt sich o. B. d. A. in Richtung der Stabkraft legen. Für die Stabverlängerung (und damit die Stabkraft) gilt (näherungsweise): Der Anteil der Verschiebungen senkrecht zur \(\bar x\)-Richtung (also in \(\bar y\)-Richtung) wirkt sich nicht aus, weil er durch das Skalarprodukt verloren geht. Daher lässt sich o. B. d. A. annehmen, dass die Verschiebungen senkrecht zur \(\bar x\)-Richtung gleich Null sind. Passive Transformation von Vektor-Komponenten im um den Winkel \(\varphi\) gedrehten System mit den Abkürzungen \((c, s) = \left(\cos\varphi, \sin\varphi\right)\): Invertiert: Dies einsetzen in das Lineare System in 1D liefert: Und bei lokalen Bezugssystemen:
Nachfolgend ein Programm, dass Sie ausführen können: Auf dem PC z.B. mit Anaconda. Im Browser (online) in drei Schritten: Copy: Source Code in die Zwischenablage kopieren. Paste: Source Code als Python-Notebook einfügen z.B. auf: JupyterLab oder Play: Ausführen. Statt SymPy lieber anderes CAS (Computeralgebrasystem) verwenden? Eine Auswahl verschiedener CAS gibt es hier.Details zum Übergang von 1D auf 2D
SymPy
from sympy import pprint, Matrix, var
pprint("\n\nPassive Transformation:")
c, s = var("c, s")
C = Matrix([
[1, 0,-1,0],
[0,0,0,0],
[-1,0,1,0],
[0,0,0,0]]
)
pprint(C)
R = Matrix([
[c,s,0,0],
[-s,c,0,0],
[0, 0,c,s],
[0,0,-s,c]]
)
Rt = R.transpose()
tmp = Rt*C*R
pprint(tmp)
# Local Frames:
c1, s1 = var("c1, s1")
c2, s2 = var("c2, s2")
C = Matrix([
[1, 0,-1,0],
[0,0,0,0],
[-1,0,1,0],
[0,0,0,0]]
)
pprint(C)
R = Matrix([
[c1,s1,0,0],
[-s1,c1,0,0],
[0, 0,c2,s2],
[0,0,-s2,c2]]
)
Rt = R.transpose()
tmp = Rt*C*R
pprint(tmp)
Passive Transformation:
⎡1 0 -1 0⎤
⎢ ⎥
⎢0 0 0 0⎥
⎢ ⎥
⎢-1 0 1 0⎥
⎢ ⎥
⎣0 0 0 0⎦
⎡ 2 2 ⎤
⎢ c c⋅s -c -c⋅s⎥
⎢ ⎥
⎢ 2 2 ⎥
⎢c⋅s s -c⋅s -s ⎥
⎢ ⎥
⎢ 2 2 ⎥
⎢-c -c⋅s c c⋅s ⎥
⎢ ⎥
⎢ 2 2 ⎥
⎣-c⋅s -s c⋅s s ⎦
⎡1 0 -1 0⎤
⎢ ⎥
⎢0 0 0 0⎥
⎢ ⎥
⎢-1 0 1 0⎥
⎢ ⎥
⎣0 0 0 0⎦
⎡ 2 ⎤
⎢ c₁ c₁⋅s₁ -c₁⋅c₂ -c₁⋅s₂⎥
⎢ ⎥
⎢ 2 ⎥
⎢c₁⋅s₁ s₁ -c₂⋅s₁ -s₁⋅s₂⎥
⎢ ⎥
⎢ 2 ⎥
⎢-c₁⋅c₂ -c₂⋅s₁ c₂ c₂⋅s₂ ⎥
⎢ ⎥
⎢ 2 ⎥
⎣-c₁⋅s₂ -s₁⋅s₂ c₂⋅s₂ s₂ ⎦
Äquivalente Knotenlasten
siehe equi
Postprocessing
Stabkraft
Nach der Berechnung der gesuchten Knotenverschiebungen und der gesuchten Lagerreaktionen kann man für jeden Stab berechnen:
die genäherte Verlängerung \(\Delta l = \left(\boldsymbol u_2 - \boldsymbol u_1 \right) \cdot \boldsymbol e\) (siehe rod-lin).
die Stabkraft. Hierzu gibt es zwei Möglichkeiten:
Verwendung der berechneten Lagerreaktionen und der äußeren Kräfte. Damit berechnen der Stabkräfte z.B. mit Knotenschnitt-Verfahren oder mit Ritterschnitt-Verfahren.
Verwendung Elastizität = Hookesches Gesetz: \(S = EA\tfrac{\Delta l}{l}\)
Spannung
Verzerrung
Zum Vergleich: Klassische Herleitung
Gleichgewicht
Die \((x,y)\)-Komponenten von \(F_1\) und \(F_2\) abhängig von \(S\) sind: mit den Abkürzungen \((c, s) = \left(\cos\varphi, \sin\varphi\right)\).Zum Vergleich 2D
Elastizität
Hookesches Gesetz:
Kinematik
Wie gezeigt ist in rod-lin, gilt für die genäherte Stabverlängerung:Zum Vergleich 2D
Lineares System
Eliminieren der 2 Unbekannten \(S\) und \(\Delta l\) aus den 4 Gleichungen (1a), (1b), (2), (3) liefert:
\[\begin{split}\tfrac{EA}{l} \left( u_1 - u_2\right) &= F_1 \\ \tfrac{EA}{l} \left( - u_1 + u_2\right) &= F_2\end{split}\]
In Matrix-Schreibweise:
Und dies erweitert auf 2D mit der Passiven Transformation liefert den linearen Zusammenhang zwischen Kräften und Verschiebungen: