3.3.A
Video
Simulation
Gegebenes Symbol: \(h\)
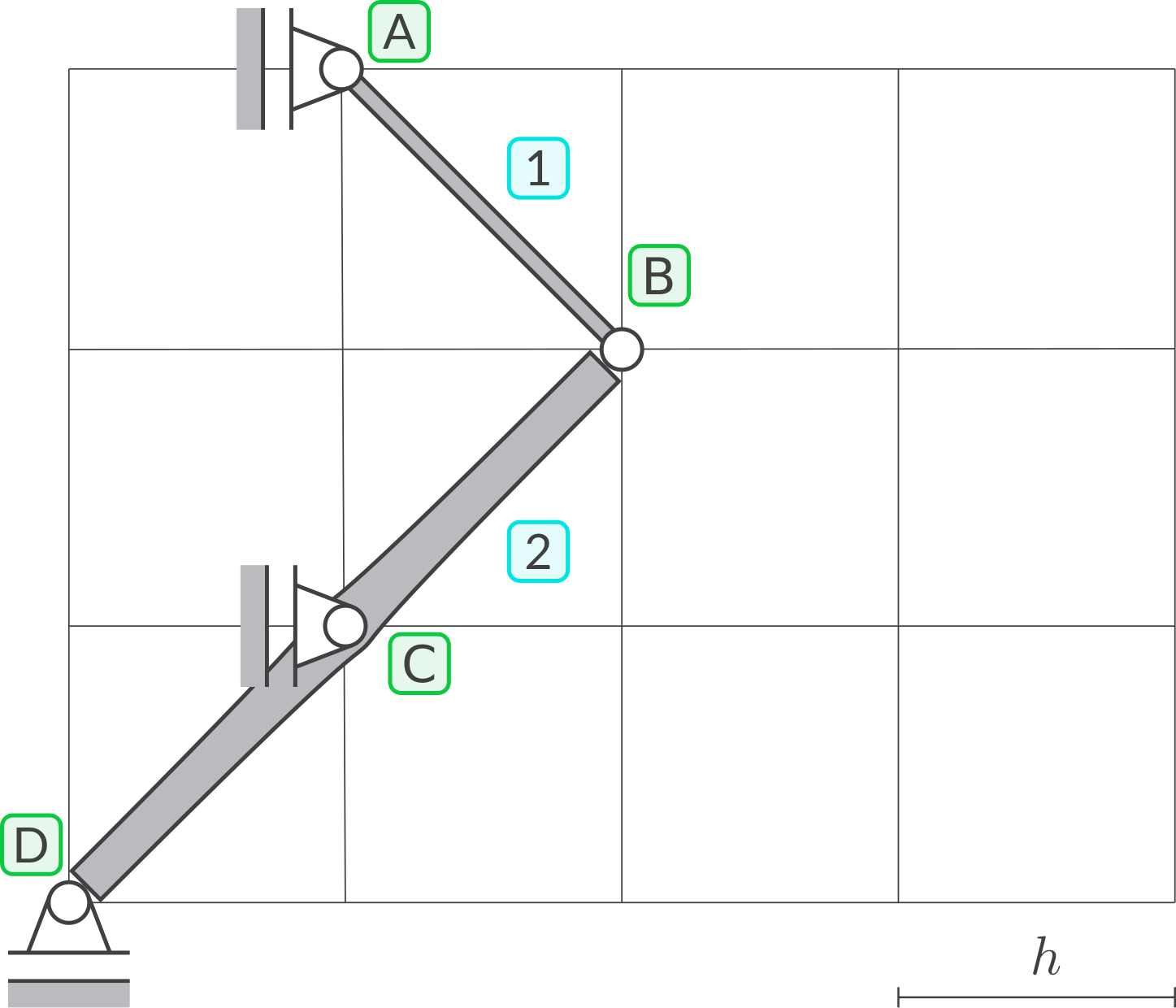
Es geht um ein bewegliches System, das aus den Starrkörpern 1 und 2 besteht. Im betrachteten Zeitpunkt ist das System in der dargestellten Lage.
Starrkörper 1 und 2 sind bei B gelenkig miteinander verbunden.
Das Gelenk A wird vertikal geführt.
Das Gelenk C wird vertikal geführt.
Das Gelenk D wird horizontal geführt.
a) Geschwindigkeiten von Teilchen
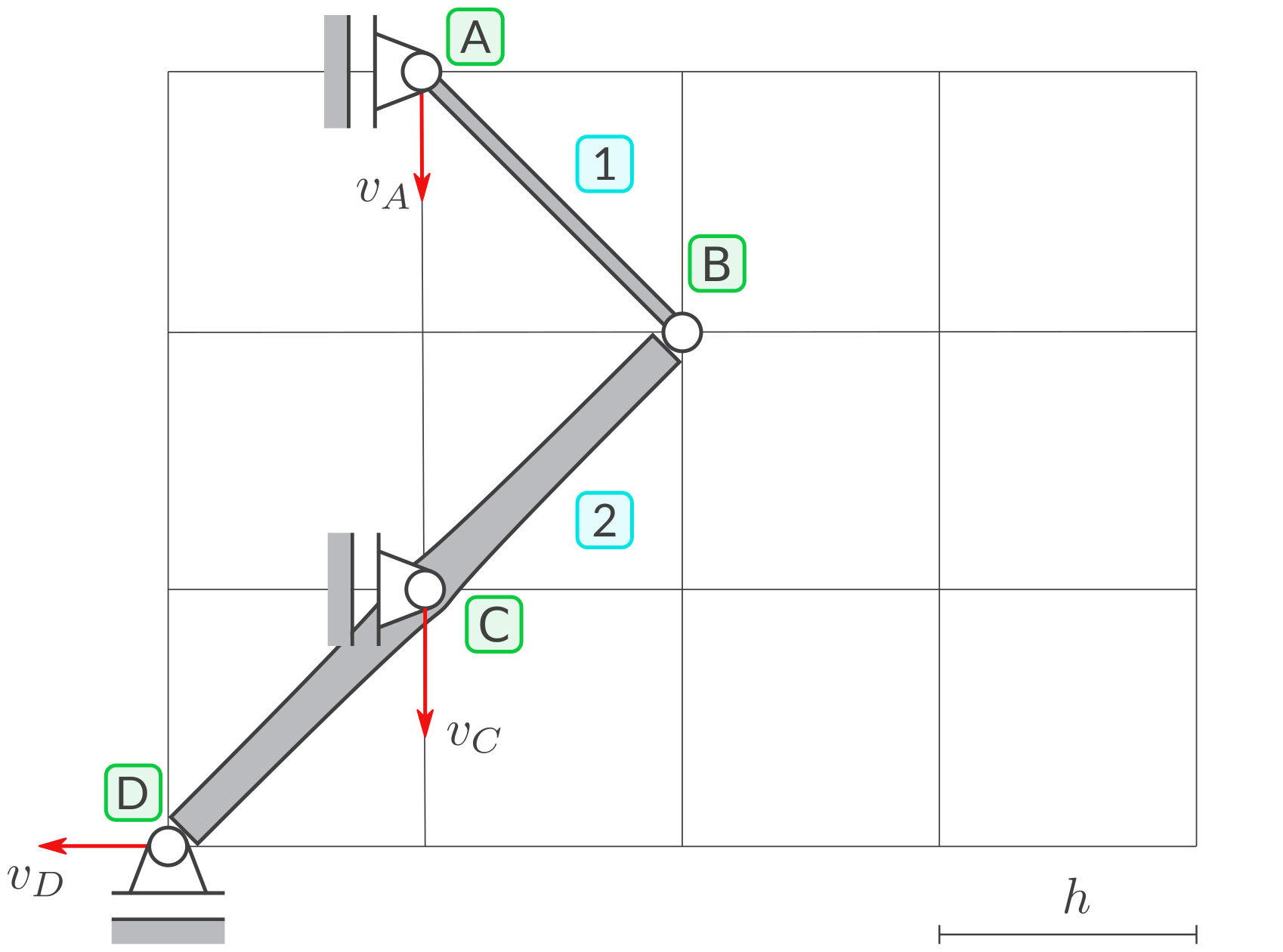
Definieren Sie mit Pfeilen:
\(v_A\): Die Geschwindigkeit eines Teilchens bei A (nach unten positiv).
\(v_C\): Die Geschwindigkeit eines Teilchens bei C (nach unten positiv).
\(v_D\): Die Geschwindigkeit eines Teilchens bei D (nach links positiv).
Lösung
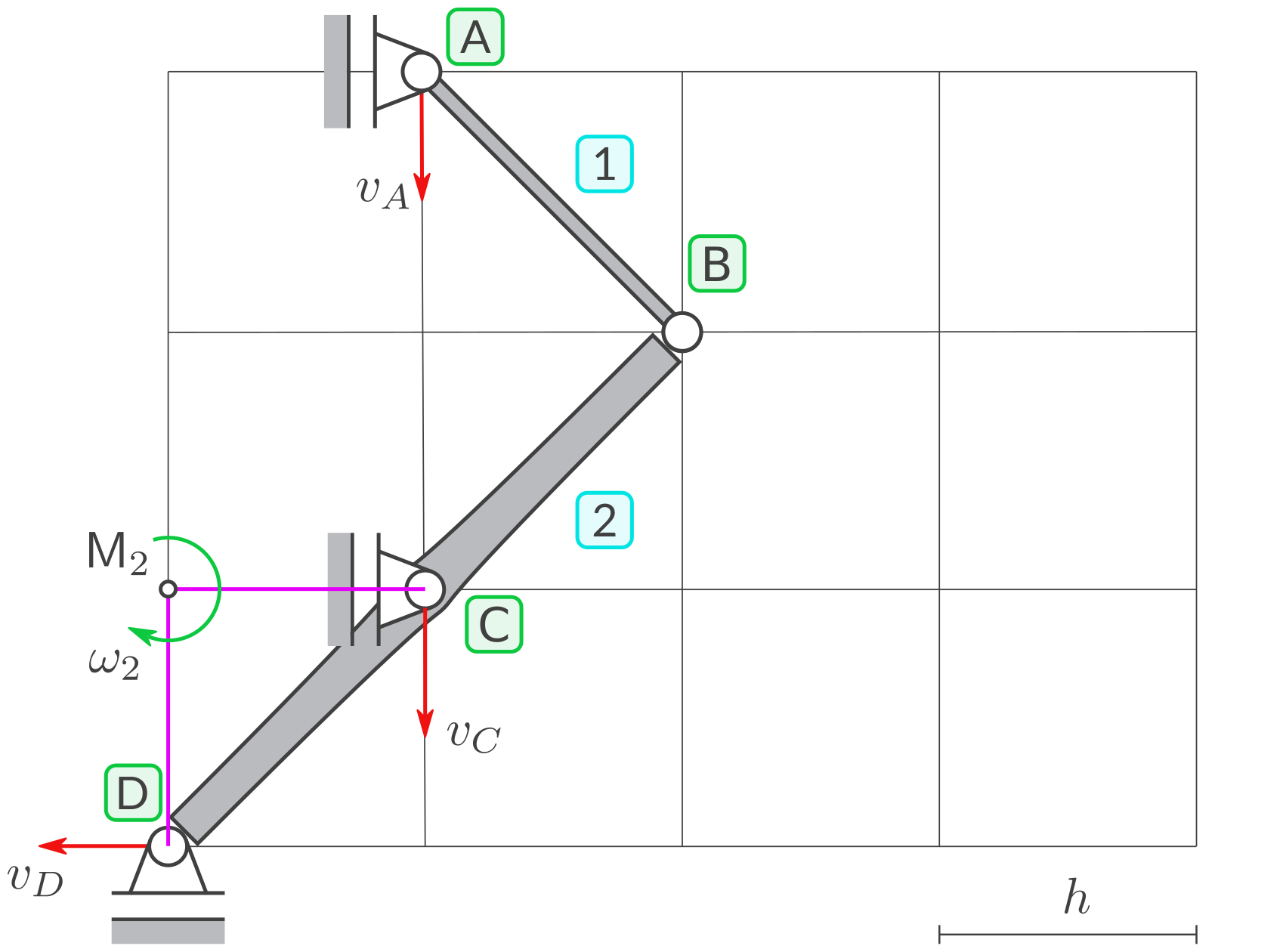
b) Winkelgeschwindigkeit von Körper 2
Definieren Sie die Winkelgeschwindigkeit \(\omega_2\) von Starrkörper 2 (positiv im Uhrzeigersinn). Und zwar am Momentanpol von Starrkörper 2.
Lösung
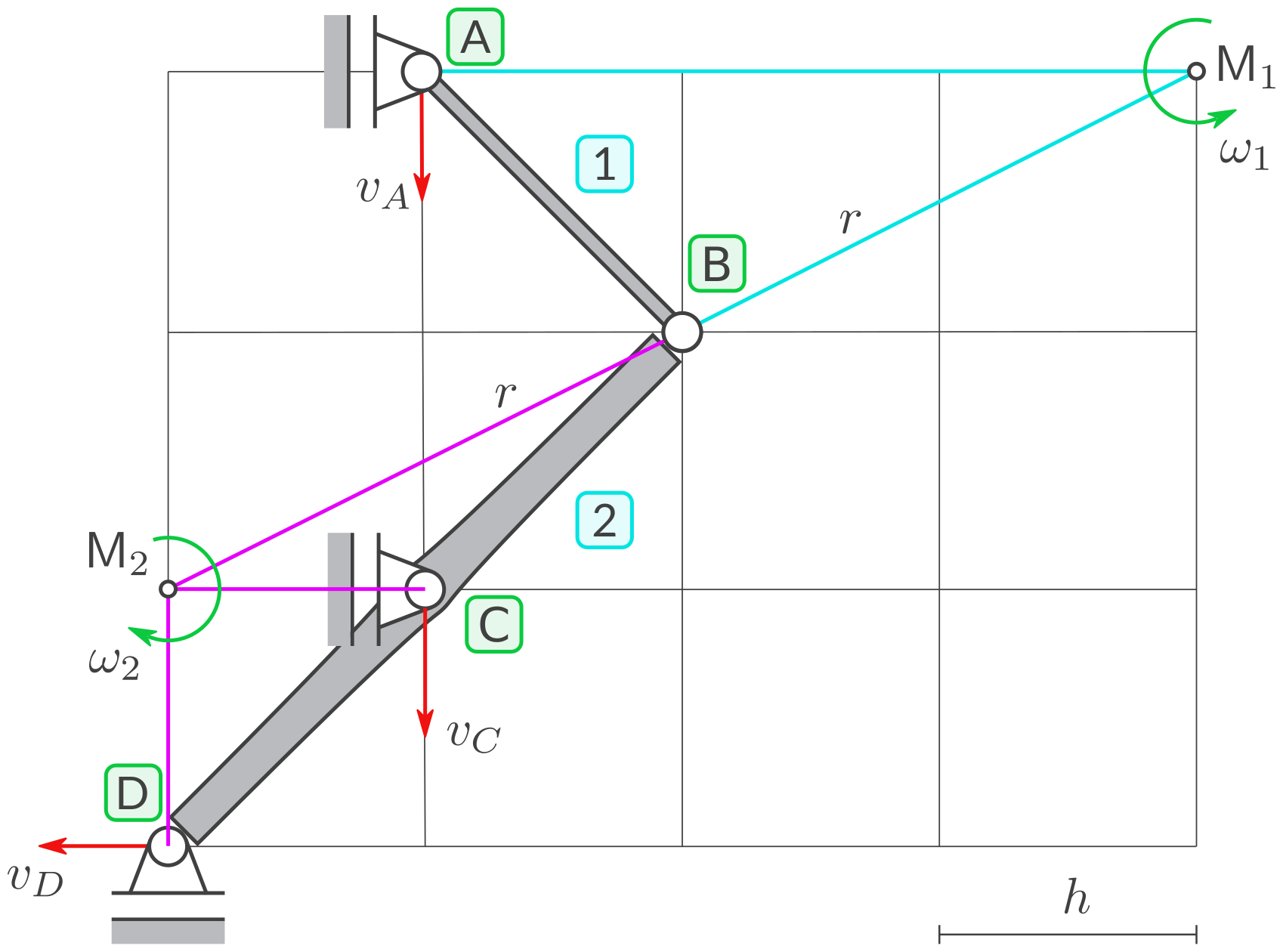
c) Winkelgeschwindigkeit von Körper 1
Definieren Sie die Winkelgeschwindigkeit \(\omega_1\) von Starrkörper 1 (positiv entgegen dem Uhrzeigersinn). Und zwar am Momentanpol von Starrkörper 1.
Lösung
d) Vergleich der Winkelgeschwindigkeiten
Zeigen Sie, dass:
Darum ist:Lösung
e) Geschwindigkeit von A
Zeigen Sie, dass:
D bewegt sich nach links, weil D unter dem Momentanpol liegt und Starrkörper 2 im Uhrzeigersinn rotiert. Da der Abstand zwischen \(\mathsf{M}_2\) und D ein Drittel des Abstands zwischen \(\mathsf{M}_1\) und A ist, und da beide Starrkörper dieselbe Winkelgeschwindigkeit \(\omega = \omega_1=\omega_2\) haben, gilt: Und darum ist:Lösung
Berechnen Sie \(v_A\) für die folgenden gegebenen Größen:
Lösung
f) Winkelgeschwindigkeit von 2
Berechnen Sie für dieselben gegebenen Größen die Winkelgeschwindigkeit \(\omega_2\) von Starrkörper 2:
in \(1 / \mathrm s\) (1 pro Sekunde) und
in \(^\circ / \mathrm s\) (Grad pro Sekunde) und gerundet auf \(0{,}1\).
Lösung